|
Search this API | ||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||
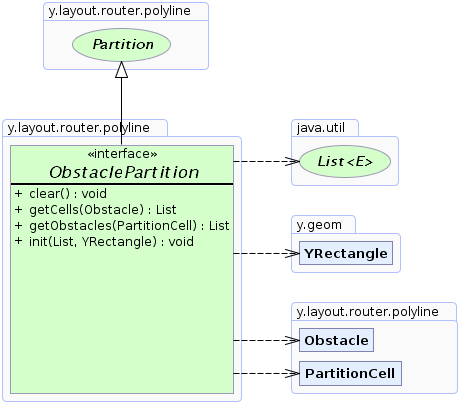
public interface ObstaclePartition
This class implements a Partition that takes a list of Obstacles as input to subdivide an area into
PartitionCells.
Implementations have to satisfy the following condition for each pair of Obstacle and PartitionCell:
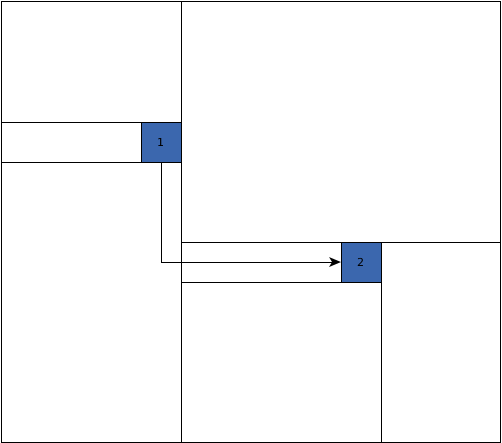
Obstacles either completely cover PartitionCells or do not intersect PartitionCells at all.ObstaclePartition of a graph consisting of two nodes connected by one edge.
The two nodes are considered to be obstacles. The colored partition cells subdivide the area such that
each obstacle either completely covers a partition cell or does not intersect with a partition cell.
| Method Summary | |
|---|---|
void |
clear()
Clears the partition data such that the ObstaclePartition can be reused and
initialized with new Obstacles. |
java.util.List |
getCells(Obstacle obstacle)
Returns all PartitionCells that are completely covered by the given Obstacle. |
java.util.List |
getObstacles(PartitionCell cell)
Returns all Obstacles that cover the given PartitionCell. |
void |
init(java.util.List obstacles,
YRectangle bounds)
Initializes a new ObstaclePartition of the area with the given bounds using the given list of
Obstacles. |
| Methods inherited from interface y.layout.router.polyline.Partition |
|---|
getBounds, getCells, getNeighbors |
| Method Detail |
|---|
void init(java.util.List obstacles,
YRectangle bounds)
ObstaclePartition of the area with the given bounds using the given list of
Obstacles.
Unused partitions must be cleared using method clear().
obstacles - a list of Obstacles that have to be considered by the partitionbounds - the bounds of the partitionclear()java.util.List getObstacles(PartitionCell cell)
Obstacles that cover the given PartitionCell.
cell - the partition cell for which the obstacles will be returned
Obstacle instances that cover the given celljava.util.List getCells(Obstacle obstacle)
PartitionCells that are completely covered by the given Obstacle.
obstacle - the obstacle for which the covered cells will be returned
PartitionCell instances that are completely covered by the given obstaclevoid clear()
ObstaclePartition can be reused and
initialized with new Obstacles.
init(List, YRectangle)
|
© Copyright 2000-2025, yWorks GmbH. All rights reserved. |
||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||