| Chapter 6. Underlying Graph Model of the yFiles Graph Analysis Algorithms | ||
|---|---|---|
| Prev | Next | |
Table of Contents
This chapter introduces the general concepts of the yFiles software library. These include purpose-specific, i.e., graph structure related topics as well as practical programming aspects.
All yFiles functionality centers around the mathematical notion of a directed graph. A directed graph is defined as consisting of two sets, a node set and an edge set. A node represents any kind of entity and an edge represents a relation between any two nodes from the node set. Directed graph means that all edges from the edge set have direction, i.e., a distinct source node and a distinct target node. The mathematical notation for an edge is a pair where the first component denotes source and the second component denotes target node: edge e = (source, target).
This directed graph structure is reflected by the classes
Graph![]() ,
Node
,
Node![]() , and
Edge
, and
Edge![]() in package com.yworks.yfiles.base.
Together, these classes form the foundation for all graph functionality.
in package com.yworks.yfiles.base.
Together, these classes form the foundation for all graph functionality.
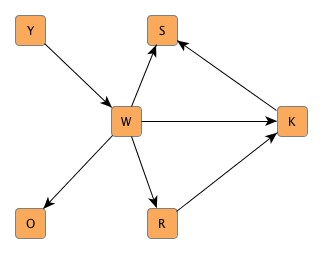
Figure 6.1, “A simple graph” shows the picture of an example graph with six nodes and seven edges where the nodes are represented by filled circles and the edges are drawn as straight lines between two nodes with an arrowhead at the target end indicating direction. The exact mathematical notation of this example graph would be: Graph G = (V,E), with node set V = {Y,W,O,R,K,S} and edge set E = {(Y,W), (W,O), (W,R), (W,K), (W,S), (R,K), (K,S)}.
Some interesting aspects of the graph structure implementation should be observed. For example, there is no requirement that source and target node of a directed edge have to be different. When they are identical, the special kind of edge is also called "self-loop." (A self-loop at the node with label "Y", for example, would be written as (Y,Y).)
On another note, there is also no restriction on the number of edges connecting the same two nodes from a graph. This means that the yFiles graph structure in fact provides not only a set but a multi-set to store the edges of a graph. We will call such edge sets "parallel edges."
Another consequence with a directed graph is that edges connecting to a node can be distinguished into incoming edges and outgoing edges. Incoming edges are those that have the node as target, while outgoing edges are those that have the node as source. The set of all edges at a node is simply called its "edges." Figure 6.1, “A simple graph”, for example, shows four outgoing edges and one incoming edge for the node labeled "W."
Despite the strong emphasis on the directedness of the graph structure it is nevertheless possible to mimic undirected behavior easily. Both the graph structure itself and many algorithms (where appropriate) offer methods to ignore edge direction entirely. (Effectively, this means that directedness/undirectedness ultimately is a matter of interpretation on the algorithm's side.)
Figure 6.2, “Various configurations” shows some graph excerpts that depict (from left to right) a directed edge and a self-loop, several self-loops at one node, and a set of parallel edges.
Keep in mind that the presented figures are only a guidance to demonstrate the various possibilities provided by yFiles. The yFiles algorithms graph structure has neither positional information nor any visual representation associated with the graph elements.
The yFiles graph structure implementation adheres to the idea that the graph should be the only instance in charge of all structural changes. (Structural changes most notably means node and edge creation and removal.) This paradigm has some important implications:
Additionally, there is a clear cascade of responsibilities for providing access to certain graph element information:
A graph provides access to its nodes and edges by means of bidirectional cursors. A cursor is a general concept to iterate over a sequence of objects one after the other. Bidirectional means that it is possible to both move forward and backward on the sequence.
The actual methods from class Graph return either a
NodeCursor![]() or an
EdgeCursor
or an
EdgeCursor![]() instance to be used for
iterating over the respective elements.
Both NodeCursor and EdgeCursor present a read-only view on the actual graph
elements.
That way it is guaranteed that class Graph remains the single authority for
any structural changes.
instance to be used for
iterating over the respective elements.
Both NodeCursor and EdgeCursor present a read-only view on the actual graph
elements.
That way it is guaranteed that class Graph remains the single authority for
any structural changes.
On a side note, observe that NodeCursor and EdgeCursor are typed variants of their
common superinterface YCursor![]() .
.
The yFiles library defines a base implementation of a doubly linked list, class
YList![]() .
Most notably however, are the typed descendants of YList, classes
NodeList
.
Most notably however, are the typed descendants of YList, classes
NodeList![]() and
EdgeList
and
EdgeList![]() .
The latter two are used for the respective kinds of graph elements while their
common superclass stores objects of arbitrary type.
NodeList and EdgeList are frequently used as return types or as parameters in
several methods throughout the yFiles library.
.
The latter two are used for the respective kinds of graph elements while their
common superclass stores objects of arbitrary type.
NodeList and EdgeList are frequently used as return types or as parameters in
several methods throughout the yFiles library.
|
Copyright ©2010-2015, yWorks GmbH. All rights reserved. |